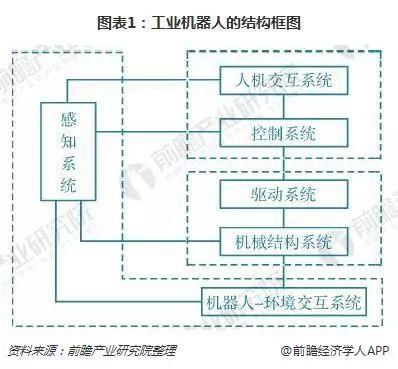
工(gōng)業機器人技術特點
一般來(lái)說,工(gōng)業機器人由3大(dà)部分6個子系統組成。3大(dà)部分是機械部分、傳感部分和(hé)控制部分。6個子系統可分爲機械結構系統、驅動系統、感知(zhī)系統、機器人-環境交互系統、人機交互系統和(hé)控制系統。
根據上(shàng)述結構涉及到(dào)的技術,總結出工(gōng)業機器人技術主要有三大(dà)特點:一是工(gōng)業機器人集精密化、柔性化、智能(néng)化、軟件應用(yòng)開(kāi)發等先進制造技術于一體,通過對(duì)過程實施檢測、控制、優化、調度、管理(lǐ)和(hé)決策,實現(xiàn)增加産量、提高(gāo)品質、降低(dī)成本、減少資源消耗和(hé)環境污染,是工(gōng)業自(zì)動化水(shuǐ)平的最高(gāo)體現(xiàn);
二是工(gōng)業機器人與自(zì)動化成套裝備具備精細制造、精細加工(gōng)以及柔性生産等技術特點,是繼動力機械、計(jì)算(suàn)機之後,出現(xiàn)的全面延伸人的體力和(hé)智力的新一代生産工(gōng)具,是實現(xiàn)生産數字化、自(zì)動化、網絡化以及智能(néng)化的重要手段;
三是工(gōng)業機器人與自(zì)動化成套技術,融合了(le)多項學科,涉及多項技術領域,包括工(gōng)業機器人控制技術、機器人構建有限元分析、激光加工(gōng)技術、智能(néng)測量、建模加工(gōng)一體化、工(gōng)廠(chǎng)自(zì)動化以及精細物流等先進制造技術,技術綜合性強。
工(gōng)業機器人技術現(xiàn)狀
截至2018年6月12日,工(gōng)業機器人技術專利申請(qǐng)總量達到(dào)23054項。其中,發明(míng)專利數最多,達到(dào)9946項,占比爲43.14%;實用(yòng)新型專利數其次,爲8331項,占比爲36.14%;外(wài)觀、發明(míng)授權專利數占比分别爲8.90%、11.82%。
從(cóng)申請(qǐng)專利數量來(lái)看(kàn),2007-2017年,我國工(gōng)業機器人專利申請(qǐng)數量總體上(shàng)呈上(shàng)升的趨勢。2014-2016三年間,專利申請(qǐng)數量大(dà)幅增多;到(dào)2017年,工(gōng)業機器人專利申請(qǐng)數量達到(dào)5608項。

從(cóng)公開(kāi)專利數量來(lái)看(kàn),2007-2017年,我國工(gōng)業機器人專利公開(kāi)數量總體上(shàng)呈趨勢。2017年,我國工(gōng)業機器人專利公開(kāi)數量爲6012項,達到(dào)近年來(lái)最大(dà)值;截至2018年6月,專利公開(kāi)數量爲3631項。
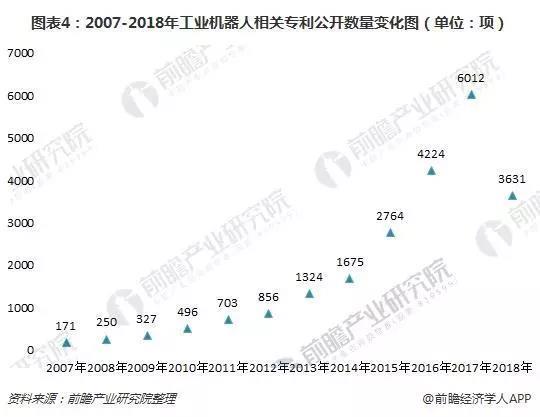
(注:2018年數據截至6月)
截至2018年6月,從(cóng)我國工(gōng)業機器人專利技術構成來(lái)看(kàn),B25J(機械手;裝有操縱裝置的容器)專利申請(qǐng)數量排名第一,爲7074項,占比達到(dào)26.63%;B23K(釺焊或脫焊;焊接;用(yòng)釺焊或焊接方法包覆或鍍敷;局部加熱切割,如火焰切割;用(yòng)激光束加工(gōng))專利申請(qǐng)數排名第二,專利數量爲1594項,占比爲6.00%;其餘技術占比均在5%以下(xià)。

工(gōng)業機器人技術趨勢
目前,工(gōng)業機器人技術正朝着模糊控制、智能(néng)化、通用(yòng)化、标準化、模塊化、高(gāo)精化、網絡化及自(zì)我完善和(hé)修複能(néng)力等方向進行研發。
首先,模糊控制是利用(yòng)模糊數學的基本思想和(hé)理(lǐ)論的控制方法。對(duì)于複雜(zá)的系統,由于變量太多,用(yòng)傳統控制模型難以正确描述系統的動态,此時(shí)便可以用(yòng)模糊數學來(lái)處理(lǐ)這(zhè)些(xiē)控制問題。未來(lái)機器人的特點在于其具有更高(gāo)的智能(néng)。随着計(jì)算(suàn)機技術、模糊控制技術、專家系統技術、人工(gōng)神經網絡技術和(hé)智能(néng)工(gōng)程技術等高(gāo)新技術的不斷發展,工(gōng)業機器人的工(gōng)作(zuò)能(néng)力将會(huì)突破性的提高(gāo)及發展。
其次,工(gōng)業機器人的組件及構件實現(xiàn)通用(yòng)化、标準化、模塊化是降低(dī)成本的重要途徑之一。
第三,随着制造業對(duì)機器人要求的提高(gāo),開(kāi)發高(gāo)精度工(gōng)業機器人是必然的發展結果。
第四,目前應用(yòng)的機器人大(dà)多僅實現(xiàn)了(le)簡單的網絡通訊和(hé)控制,如何使機器人由獨立的系統向群體系統發展,使遠距離操作(zuò)監控、維護及遙控是目前機器人研究中的熱點之一。
最後,機器人應該具有自(zì)我修複的能(néng)力,才能(néng)更好(hǎo)地避免因爲突發狀況導緻的生産停頓。當出現(xiàn)錯誤指令時(shí)應該自(zì)己進行報(bào)警或調試;當元器件損壞時(shí)可以自(zì)我進行修複。
免責聲明(míng)
文(wén)章來(lái)源:前瞻網
凡資訊來(lái)源注明(míng)爲其他(tā)媒體來(lái)源的信息,均爲轉載自(zì)其他(tā)媒體,并不代表本網站(zhàn)贊同其觀點,也(yě)不代表本網站(zhàn)對(duì)其真實性負責。您若對(duì)該文(wén)章内容有任何疑問或質疑,請(qǐng)立即與後台小(xiǎo)編聯系,平台将迅速給您回應并做處理(lǐ)。